
【導(dǎo)讀】傳統(tǒng)的驅(qū)動電機結(jié)構(gòu)復(fù)雜,效率低,噪音大,而無刷直流電動機是一種用電子換相裝置代替機械換相裝置的新型直流電動機,沒有激磁損耗,熱阻較小,散熱容易,具有效率高、過載能力強、無換向火花等優(yōu)點,是高速電機的一個重要發(fā)展方向。本文介紹一種以st7fmc1k2為核心的無傳感器無刷直流電機控制系統(tǒng)。
通常無刷直流電機采用電子或機電式位置傳感器獲取轉(zhuǎn)子位置信息,然而有些傳感器的分辨率低或運行特性不好,有的對環(huán)境條件如震動,潮濕和溫度變化很敏感,使性能下降,系統(tǒng)可靠性和精確性降低。傳感器還大大增加了電氣連接線數(shù)目,增加干擾,增大體積和成本。因此,在小型輕載條件下,無位置傳感器無刷直流電機成為理想的選擇并具有廣泛的發(fā)展前景。采用無傳感器無刷直流電機的電動摩托車作為綠色環(huán)保交通工具具有操作簡單、騎乘舒適、維護方便、污染小和噪聲低等優(yōu)
電動摩托車的控制器結(jié)構(gòu)、工作原理及電機控制部分硬件設(shè)計
電動摩托車的控制器結(jié)構(gòu)與工作原理
電動摩托車的控制器具有電機驅(qū)動控制、參數(shù)顯示和電池管理等基本功能。電動摩托車通過控制器采集在各種情況下的參數(shù),控制電機運行,調(diào)節(jié)車速度,提高電機和電池的效率,保障騎乘者和他人的人身安全。能量管理系統(tǒng)對電池實施有效的管理,監(jiān)督和控制電池的充放電過程,使電池處于良好的工作狀態(tài),保證電池的有效使用壽命。其總體機構(gòu)如圖1。
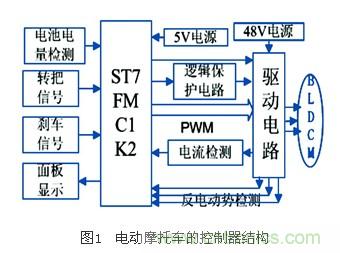
原主控制芯片st7fmc1k2作為控制核心,向驅(qū)動電路傳遞pwm信號以驅(qū)動電機;通過i/o口向面板顯示電路傳遞時鐘信號、復(fù)位信號和數(shù)據(jù)信號。單片機從驅(qū)動電路部分獲取反電動勢檢測信號并進行處理以及時對電機換相;同時從驅(qū)動電路獲取電流采樣信號,以進行過流保護;從電池電量檢測電路獲取電壓信號以進行欠壓保護。轉(zhuǎn)把信號用于改變電壓以改變pwm的占空比來對電機進行調(diào)速,剎車信號用于緊急情況時及時停止電機的運行。
st7fmc1k2芯片的介紹[1]
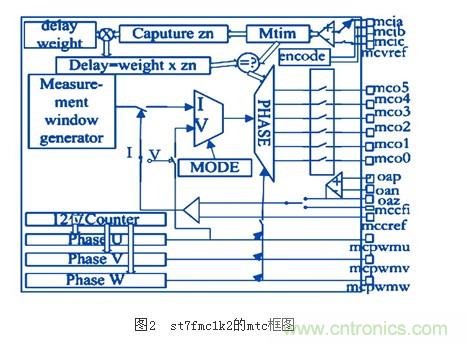
目前市場上有很多無刷電機專用控制芯片,大部分廠商采用motorola的mc33035控制,它具有無刷電機控制系統(tǒng)所需要的基本功能。本設(shè)計綜合考慮性價比等因素采用意法公司的st7fmc1k2作為主控芯片,可以實現(xiàn)全部功能并能夠滿足所需求的控制精度。具體特點有:8k的flash和384字節(jié)的ram,配有l(wèi)vd、看門狗、高抗噪電磁兼容電路,10位多通道a/d轉(zhuǎn)換器、sci,spi、i2c、usb和帶pwm功能的定時器,它的最大特點是內(nèi)置了增強型的專用mtc,見圖2,含有一個pwm管理單元,可通過軟件設(shè)置不同的pwm方式,內(nèi)置的運算放大器和比較器可以對電機繞組電流采樣信號進行放大,實現(xiàn)兩種不同的驅(qū)動模式:電壓模式和電流模式。電流模式以定子繞組中的電流為直接控制對象,通過單片機內(nèi)部的pwm占空比和外部rc電路改變電流設(shè)定的參考值,可以精確地跟蹤定子繞組中的電流,實現(xiàn)輸出力矩的直接控制。這樣就降低處理器成本、減少外圍器件數(shù)量、減少pcb板尺寸、優(yōu)化系統(tǒng)縮短開發(fā)周期。
無刷直流電機控制部分硬件設(shè)計
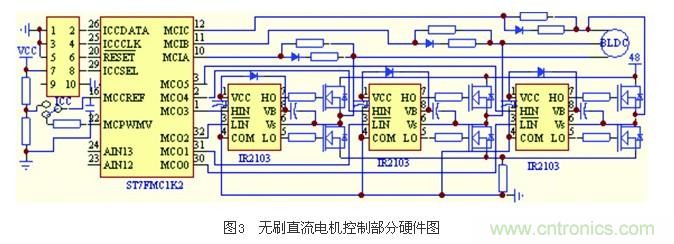
無刷直流電機控制部分是整個控制器的核心,其設(shè)計的好壞將影響整個系統(tǒng),本設(shè)計的主要電路圖如圖3所示。為了獲得可調(diào)的方波電壓,利用電力電子器件的完全可控性,采用pwm脈寬調(diào)制技術(shù),直接將恒定的直流電壓調(diào)制成可變大小和極性的交流電壓作為電機的電樞端電壓,實現(xiàn)系統(tǒng)的平滑調(diào)速。逆變電路和驅(qū)動電路是主控芯片與被控電機之間的紐帶,其傳輸性能的好壞直接影響著整個系統(tǒng)的運行質(zhì)量。mosfet具有開關(guān)速度快、高頻特性好、輸入阻抗高、驅(qū)動功率小、熱穩(wěn)定性優(yōu)良、無二次擊穿問題、安全工作區(qū)寬和跨導(dǎo)線性度高等顯著特點,本控制系統(tǒng)采用三組獨立控制信號驅(qū)動的mosfet組成的全橋逆變器變換電路。驅(qū)動芯片采用八腳的ir2103,mosfet采用stp75nf75,里面自帶有續(xù)流二極管,這樣也減小了pcb的體積。采用過零點檢測法檢測反電勢[3][4],每個過零點都超前下個換相點30°電角度,只要測出未道導(dǎo)通相的過零時刻再進行30°電角度延時即可實現(xiàn)換相,反電動勢信號送入mcia,mcib,mcic進行處理以對無刷直流電機進行換相。
無刷直流電機系統(tǒng)軟件設(shè)計
無刷直流電機控制系統(tǒng)的軟件用c語言設(shè)計而成,采用模塊化編程和結(jié)構(gòu)化編程,即將程序分解成若干個小模塊,各個模塊保持相對的獨立性,只靠少量的出入口參數(shù)聯(lián)系這樣使程序的調(diào)試、修改、維護都比較方便;各個模塊利用嚴(yán)格的轉(zhuǎn)移和調(diào)用語句組成一個嚴(yán)密的整體。主要實現(xiàn)無位置傳感器無刷直流電機的位置檢測、轉(zhuǎn)速的調(diào)節(jié)、pwm信號的產(chǎn)生等功能。由主程序、子程序和中斷服務(wù)程序組成。
主程序設(shè)計
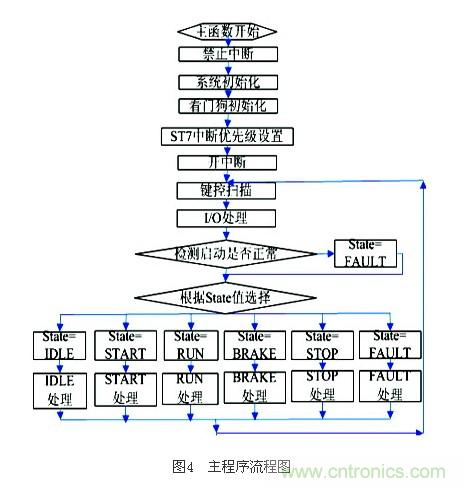
主程序主要實現(xiàn):系統(tǒng)的定時器、i/o口、相關(guān)外圍設(shè)備等系統(tǒng)的初始化;看門狗初始化;st7mc1k2的中斷優(yōu)先級的設(shè)置;idle、start、run、brake和stop五種狀態(tài)的轉(zhuǎn)換及其各自所做出的相應(yīng)處理程序。當(dāng)系統(tǒng)進行初始化并進行相應(yīng)的中斷處理以后將進入主循環(huán),主循環(huán)包括鍵掃描、i/o口處理、電機啟動、五種狀態(tài)的轉(zhuǎn)換及其電壓電流模式的轉(zhuǎn)換等,流程圖見圖4:
子程序設(shè)計
子程序模塊包括i/o口初始化子程序、定時器a子程序、外圍設(shè)備初始化子程序、看門狗初始化和刷新子程序、a/d轉(zhuǎn)換子程序、電機預(yù)定位子程序、運放設(shè)置子程序、閉環(huán)調(diào)節(jié)子程序、周期轉(zhuǎn)頻率子程序等。各模塊相對獨立又通過一定的參數(shù)出入口聯(lián)系。
中斷程序
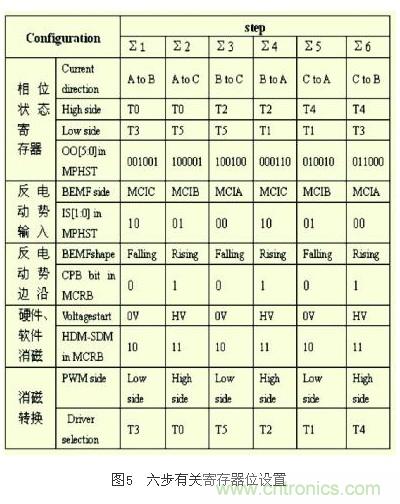
中斷程序包括定時器a的中斷處理程序、換相和消磁中斷處理程序、速率更新中斷處理程序、過零檢測中斷處理程序等。此無刷直流電機采用典型的六步控制方式來進行控制,這部分程序嵌入到換相與中斷處理程序中去,六步控制的相關(guān)寄存器設(shè)置見圖5所示。
實驗結(jié)果及其分析
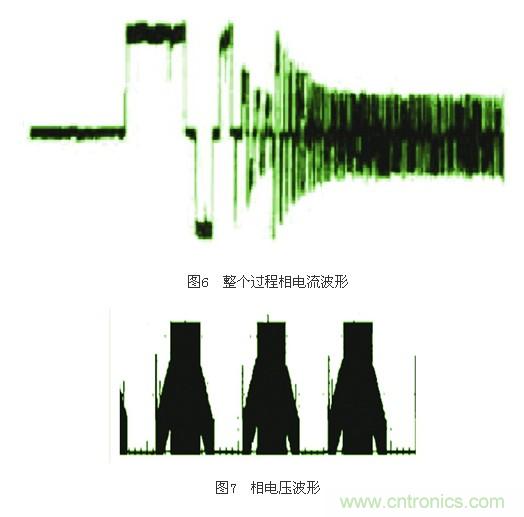
采用上述理論,這里采用austere48v無刷直流電機,啟動最大電流18a,正常運行時10-15a,結(jié)合相關(guān)硬件和軟件設(shè)計,已經(jīng)成功地實現(xiàn)了對電動摩托車上無位置傳感器無刷直流電機控制。實驗結(jié)果表明,在電源電壓一定的情況下,隨著控制信號pwm波占空比不斷增大,電動機上的平均電壓隨之變大,速度亦相應(yīng)上升。圖6為整個過程的相電流波形,圖7為正常運行時的相電壓波形。圖6中過程可以分析如下:電機采用三步啟動方式,先進行轉(zhuǎn)子預(yù)定位,然后同步加速,加速到一定階段后可以檢測到反電動勢,當(dāng)檢測到兩個反電動勢后進入自動切換模式,此時先用電流模式,然后切換到電壓模式由轉(zhuǎn)把控制占空比以控制電機速度。
結(jié)語
作為有著廣泛市場前景和巨大社會效益的新型綠色交通工具,電動摩托車日益受到各生產(chǎn)廠家、研究機構(gòu)、廣大消費者的喜愛。本文介紹了以意法公司生產(chǎn)的st7fmc1k2專用電機控制芯片設(shè)計了一套無位置傳感器無刷直流電機控制系統(tǒng)。實驗結(jié)果表明,此設(shè)計到達了很好的控制效果,同時它簡化了系統(tǒng)線路,減小控制器體積,提高了系統(tǒng)運行效率,增長了壽命,加強了靈活性和可靠性,具有好的市場推廣價值。
【推薦閱讀】





