
【導(dǎo)讀】人們在硬開關(guān)全橋的基礎(chǔ)上,開發(fā)出了一種軟開關(guān)的全橋拓?fù)?mdash;—移相全橋,利用功率器件的結(jié)電容與變壓器的漏感作為諧振元件,使全橋電源的4個(gè)開關(guān)管依次在零電壓下導(dǎo)通,來實(shí)現(xiàn)恒頻軟開關(guān),提升電源的整體效率與EMI性能,當(dāng)然還可以提高電源的功率密度。以下講解移相全橋的12種工作模式。
移相全橋?qū)W習(xí)筆記
在早期的大功率電源(輸出功率大于1KW)應(yīng)用中,硬開關(guān)全橋(Full-Bridge)拓?fù)涫菓?yīng)用最為廣泛的一種,其特點(diǎn)是開關(guān)頻率固定,開關(guān)管承受的電壓與電流應(yīng)力小,便于控制,特別是適合于低壓大電流,以及輸出電壓與電流變化較大的場合。但受制于開關(guān)器件的損耗,無法將開關(guān)頻率提升以獲得更高的功率密度。例如:一個(gè)5KW的電源,采用硬開關(guān)全橋,即使效率做到92%,那么依然還有400W的損耗,那么每提升一個(gè)點(diǎn)的效率,就可以減少50W的損耗,特別在多臺(tái)并機(jī)以及長時(shí)間運(yùn)行的系統(tǒng)中,其經(jīng)濟(jì)效益相當(dāng)可觀。
隨后,人們在硬開關(guān)全橋的基礎(chǔ)上,開發(fā)出了一種軟開關(guān)的全橋拓?fù)?mdash;—移相全橋(Phase-Shifting Full-Bridge Converter,簡稱PS FB),利用功率器件的結(jié)電容與變壓器的漏感作為諧振元件,使全橋電源的4個(gè)開關(guān)管依次在零電壓下導(dǎo)通(Zero voltage Switching,簡稱ZVS),來實(shí)現(xiàn)恒頻軟開關(guān),提升電源的整體效率與EMI性能,當(dāng)然還可以提高電源的功率密度。

上圖是移相全橋的拓?fù)鋱D,各個(gè)元件的意義如下:
Vin:輸入的直流電源
T1-T4:4個(gè)主開關(guān)管,一般是MOSFET或IGBT
T1,T2稱為超前臂開關(guān)管,T3,T4稱為滯后臂開關(guān)管
C1-C4:4個(gè)開關(guān)管的寄生電容或外加諧振電容
D1-D4:4個(gè)開關(guān)管的寄生二極管或外加續(xù)流二極管
VD1,VD2:電源次級(jí)高頻整流二極管
TR:移相全橋電源變壓器
Lp:變壓器原邊繞組電感量
Ls1,Ls2:變壓器副邊電感量
Lr:變壓器原邊漏感或原邊漏感與外加電感的和
Lf:移相全橋電源次級(jí)輸出續(xù)流電感
Cf: 移相全橋電源次級(jí)輸出電容
RL: 移相全橋電源次級(jí)負(fù)載
因?yàn)槭亲隼碚摲治觯砸獙⒁恍┢骷奶匦岳硐牖?,具體如下:
1、 假設(shè)所有的開關(guān)管為理想元件,開通與關(guān)斷不存在延遲,導(dǎo)通電阻無窮小;開關(guān)管的體二極管或者外部的二極管也為理想元件,其開通與關(guān)斷不存在延遲,正向壓降為0。
2、 所有的電感,電容都為理想元件,不存在寄生參數(shù),變壓器也為理想變壓器,不存在漏感與分布參數(shù)的影響,勵(lì)磁電感無窮大,勵(lì)磁電流可以忽略,諧振電感是外加的。
3、 超前橋臂與滯后的諧振電容都相等,即C1=C2=Clead,C3=C4=Clag。
次級(jí)續(xù)流電感通過匝比折算到初級(jí)的電感量LS`遠(yuǎn)遠(yuǎn)大于諧振電感的感量Lr即LS=Lr*n2》Lr。
PS FB一個(gè)周期可以分為12中工作模態(tài),其中正負(fù)半周期是對(duì)應(yīng)的關(guān)系,只不過改變的是電流在橋臂上的流向,下面我們首先來分析這12個(gè)工作模態(tài)的情況,揭開移相全橋的神秘面紗。
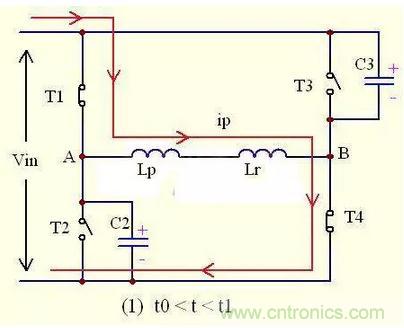
工作模態(tài)一:正半周期功率輸出過程
如上圖,此時(shí)T1與T4同時(shí)導(dǎo)通,T2與T3同時(shí)關(guān)斷,原邊電流的流向是T1—Lp—Lk—T4,如圖所示。
此時(shí)的輸入電壓幾乎全部降落在圖中的A,B兩點(diǎn)上,即UAB=Vin, 此時(shí)AB兩點(diǎn)的電感量除了圖上標(biāo)示出的Lp與Lk之外,應(yīng)該還有次級(jí)反射回來的電感LS`(因?yàn)榇藭r(shí)次級(jí)二極管VD1是導(dǎo)通的),即LS`=n2* Lf,由于是按照匝比平方折算回來,所以LS`會(huì)比Lk大很多,導(dǎo)致Ip上升緩慢,上升電流△Ip為△ Ip=(Vin-n*Uo)*(t1-t0)/( Lk+ LS`)
Vin-n*UO 是諧振電感兩端的電壓,就是用輸入電壓減去次級(jí)反射回來的電壓。
此過程中,根據(jù)變壓器的同名端關(guān)系,次級(jí)二極管VD1導(dǎo)通,VD2關(guān)斷,變壓器原邊向負(fù)載提供能量,同時(shí)給輸出電感Lf與輸出電容Cf儲(chǔ)能。(圖中未畫出)
此時(shí), UC2=UC3=UA=UAB=Vin UB=0V
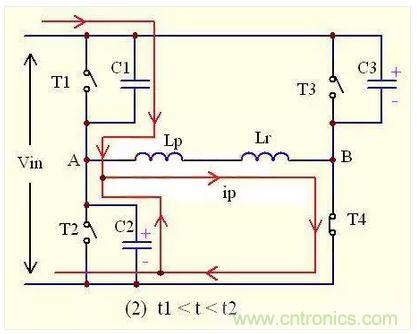
工作模態(tài)二:超前臂諧振過程
如上圖,此時(shí)超前橋臂上管T1在t1時(shí)刻關(guān)斷,但由于電感兩端電流不能突變的特性,變壓器原邊的電流仍然需要維持原來的方向,故電流被轉(zhuǎn)移到C1與C2中,C1被充電,電壓很快會(huì)上升到輸入電壓Vin,而C2開始放電,電壓很快就下降到0,即將A點(diǎn)的電位鉗位到0V。
由于次級(jí)折算過來的感量LS`遠(yuǎn)遠(yuǎn)大于諧振電感的感量Lk,故基本可以認(rèn)為此是的原邊類似一個(gè)恒流源,此時(shí)的ip基本不變,或下降很小。
C1兩端的電壓由下式給出
Vc1=Ip*(t2-t1)/(C1+C3)= Ip*(t2-t1)/2 Clead
C2兩端的電壓由下式給出
Vc1= Vin- 【Ip*(t2-t1)/2 Clead】
其中Ip是在模態(tài)2流過原邊電感的電流,在T2時(shí)刻C1上的電壓很快上升到Vin,C2上的電壓很快變成0V,D2開始導(dǎo)通。
在t2時(shí)刻之前,C1充滿電,C2放完電,即 VC1= VC3= Vin VC2=VA=VB= 0V
模態(tài)2的時(shí)間為△t= t2-t1=2 Clead * Vin/ Ip
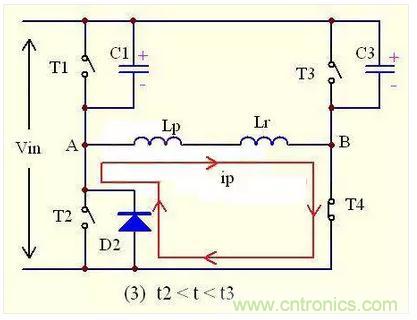
工作模態(tài)三:原邊電流正半周期鉗位續(xù)流過程
如上圖,此時(shí)二極管D2已經(jīng)完全導(dǎo)通續(xù)流,將超前臂下管T2兩端的電壓鉗位到0V,此時(shí)將T2打開,就實(shí)現(xiàn)了超前臂下管T2的ZVS開通;但此時(shí)的原邊電流仍然是從D2走,而不是T2。
此時(shí)流過原邊的電流仍然較大,等與副邊電感Lf的電流折算到原邊的電流即 ip(t)= iLf(t)/n
此時(shí)電流的下降速度跟電感量有關(guān)。
從超前臂T1關(guān)斷到T2打開這段時(shí)間td,稱為超前臂死區(qū)時(shí)間,為保證滿足T2的ZVS開通條件,就必須讓C3放電到0V,即
td ≥△t= t2-t1=2 Clead * Vin/ Ip
此時(shí), UC1=UC3=Vin , UA=UB=UAB=0V
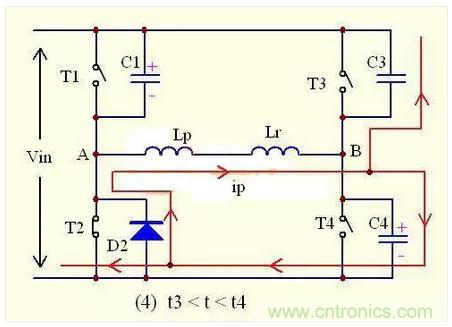
工作模態(tài)四:正半周期滯后臂諧振過程
如圖所示:在T3時(shí)刻將滯后臂下管T4關(guān)斷,在T4關(guān)斷前,C4兩端的電壓為0,所以T4是零電壓關(guān)斷。
由于T4的關(guān)斷,原邊電流ip突然失去通路,但由電感的原理我們知道,原邊電流不允許突變,需要維持原來的方向,以一定的速率減少。所以,原邊電流ip會(huì)對(duì)C4充電,使C4兩端的電壓慢慢往上升,同時(shí)抽走C3兩端的電荷。
即 ip(t)=I2sinω(t-t3)
vc4(t)=ZpI2sinω(t-t3)
vc3(t)=Vin-ZpI2sinω(t-t3)
其中,I2:t3時(shí)刻,原邊電流下降之后的電流值
Zp:滯后臂的諧振阻抗,Zp= )0.5
ω:滯后臂的諧振角頻率,ω=1/(2Lr*Clag)0.5
可能有人會(huì)感到奇怪,電流怎么出現(xiàn)了正弦函數(shù)關(guān)系呢,沒錯(cuò),因?yàn)榇藭r(shí)是原邊的諧振電感Lr與滯后臂的兩個(gè)電容C3,C4諧振,其關(guān)系就是正弦關(guān)系。
為何我上面提到只有原邊的諧振電感Lr參加諧振呢,那么次級(jí)的儲(chǔ)能電感是否有參加諧振呢?下面我們來分析一下:
由于滯后臂下管T4的關(guān)斷,C4慢慢建立起電壓,而最終等于電源電壓,即UC4=Vin,從圖紙上我們可以看到,UC4其實(shí)就是B點(diǎn)的電壓,C4兩端電壓的上升就是B點(diǎn)電壓由0V慢慢的上升過程,而此時(shí)A點(diǎn)電壓被鉗位到0V,所以這會(huì)導(dǎo)致UAB<0V,也就是說這個(gè)時(shí)候原邊繞組的電壓已經(jīng)開始反向。
由于原邊電壓的反向,根據(jù)同名端的關(guān)系,LS1,LS2同時(shí)出現(xiàn)下正上負(fù)的關(guān)系,此時(shí)VD2開始導(dǎo)通并流過電流;而由于LS1與Lf的關(guān)系,流過LS1與VD1的電流不能馬上減少到0,只能慢慢的減少;而且通過VD2的電流也只能慢慢的增加,所以出現(xiàn)了VD1與VD2同時(shí)導(dǎo)通的情況,即副邊繞組LS1,LS2同時(shí)出現(xiàn)了短路。
而副邊繞組的短路,導(dǎo)致Lf反射到原邊去的通路被切斷,也就是說會(huì)導(dǎo)致原邊參加諧振的電感量由原來的(Lf*n2+ Lr)迅速減少到只剩Lr,由于Lr比(Lf*n2+ Lr)小很多,所以原邊電流會(huì)迅速減少。
此時(shí),原邊的UAB=ULr=-Vin,UA=0V, UB= Vin
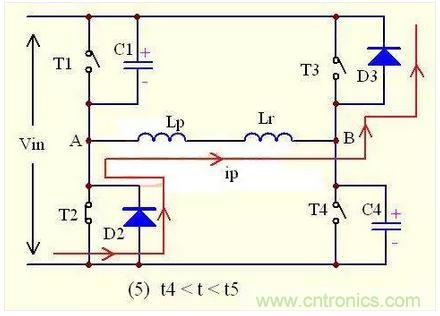
開關(guān)模態(tài)五:諧振結(jié)束,原邊電感向電網(wǎng)饋能
如圖所示,當(dāng)C4充電到Vin之后,諧振結(jié)束,就不再有電流流過C3,C4,轉(zhuǎn)而D3自然導(dǎo)通,原邊電流通過D2—Lr—D3向電網(wǎng)饋能,其實(shí)能量來源于儲(chǔ)存在Lr中的能量,此時(shí)原邊電流迅速減少,
ip(t)= Ip4- (t-t4)
其中 Ip4是t4時(shí)刻的原邊電流值
在t5時(shí)刻減少到0。
此時(shí)T3兩端的電壓降為0V,只要在這個(gè)時(shí)間將T3開啟,那么T3就達(dá)到了零電壓開啟的效果。
在這里有幾個(gè)概念需要介紹下:
死區(qū)時(shí)間:超前臂或滯后臂的上下兩管,開通或關(guān)閉的間隔時(shí)間,移相全橋電源每個(gè)周期有4個(gè)死區(qū)時(shí)間。
諧振周期:滯后臂兩個(gè)管子關(guān)斷之后到超前臂兩個(gè)管子開通之前,次級(jí)電感通過匝比反射回來的電感與諧振電感之和與各自的諧振電容的2個(gè)諧振時(shí)間;還有就是超前臂已經(jīng)開通,滯后臂兩個(gè)管子換流之前,諧振電感與各自的諧振電容的2個(gè)諧振時(shí)間。
移相角度:指的是超前臂上管開通到滯后臂下管的開通的時(shí)間間隔或超前臂下管開通到滯后臂上管的開通的時(shí)間間隔,再轉(zhuǎn)換成角頻率ω
ω=2∏f=2∏/T.
對(duì)于開關(guān)模態(tài)5來說,諧振周期一定要小于死區(qū)時(shí)間,否則就不能達(dá)到滯后臂的ZVS效果了。但此時(shí)的諧振電感是沒有次級(jí)電感通過匝比反射回來的,所以只有諧振電感參與了諧振,在設(shè)計(jì)的時(shí)候小心了,諧振電感一定要足夠大,否則諧振能量不夠的話,原邊電流就會(huì)畸變。
在t5時(shí)刻,UAB=ULr=-Vin,UA=0V, UB= UC1= Vin
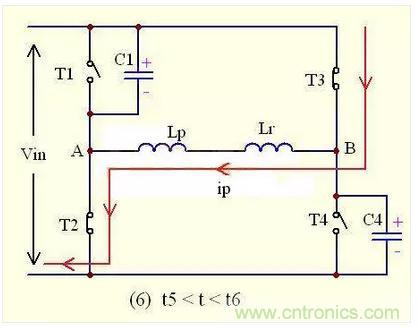
開關(guān)模態(tài)六:原邊電流從0反向增大
如圖所示,在t5時(shí)刻之前,T3已經(jīng)導(dǎo)通,在t5時(shí)刻原邊電流ip已經(jīng)下降到0,由于沒有了電流,所以D2,D3自然關(guān)斷。
在t5-t6的時(shí)間內(nèi),副邊的二極管D1,D2還是同時(shí)導(dǎo)通流過電流,將副邊繞組短路,阻斷輸出電感反射到初級(jí)的途徑,此時(shí)的負(fù)載電流還是由次級(jí)電感與輸出電容提供;同時(shí),由于原邊的T2,T3已經(jīng)導(dǎo)通,原邊電流ip流過T3--Lr--T2,又因?yàn)長r很小,所以原邊電流ip就會(huì)反向急劇增大。
即 ip(t)= - (t-t5)
在t6時(shí)刻,ip達(dá)到最大,等于副邊的電感電流折算到初級(jí)的電流
即 ip(t6)= - ILf(t6)/n
在這個(gè)開關(guān)模態(tài),原邊電流是不傳遞能量的,但副邊卻存在著一個(gè)劇烈的換流過程,通過副邊二極管VD1的電流迅速減少,VD2的電流迅速增大,在t6時(shí)刻,通過VD1的電流減少到0,通過VD2的電流等于電感電流ILf。
在t6時(shí)刻之前,原邊的UAB= ULr=-Vin,UA=0V, UB= Vin
達(dá)到t6時(shí)刻之后,移相全橋的正半周期工作結(jié)束;并開始負(fù)半周期工 作,其工作原理與正半周期相似,下面來做進(jìn)一步的分析:
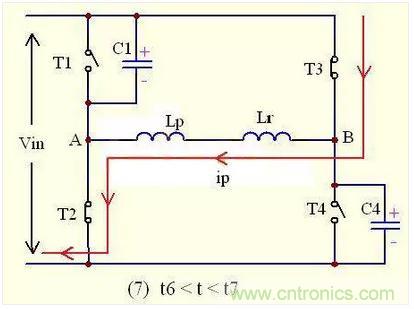
開關(guān)模態(tài)七:負(fù)半周期功率輸出過程
如上圖,此時(shí)T2與T3同時(shí)導(dǎo)通,T1與T4同時(shí)關(guān)斷,原邊電流ip的流向是T3—Lk—Lp—T2,如圖所示。
此時(shí)的輸入電壓幾乎全部降落在圖中的B,A兩點(diǎn)上,即UAB=-Vin,此時(shí)AB兩點(diǎn)的電感量除了圖上標(biāo)示出的Lp與Lk之外,應(yīng)該還有次級(jí)反射回來的電感LS`(因?yàn)榇藭r(shí)次級(jí)二極管VD2是導(dǎo)通的),即LS`=n2* Lf,由于是按照匝比平方折算回來,所以LS`會(huì)比Lk大很多,導(dǎo)致Ip上升緩慢,上升電流△Ip為-△Ip=-【 (Vin-n*Uo)*(t7-t6)/( Lk+ LS`)】
此過程中,根據(jù)變壓器的同名端關(guān)系,次級(jí)二極管VD2導(dǎo)通,VD1關(guān)斷,變壓器原邊向負(fù)載提供能量,同時(shí)給輸出電感Lf與輸出電容Cf儲(chǔ)能。(圖中未畫出)
此時(shí), UC1 =UC4=UB =Vin UAB=-Vin UA=0V
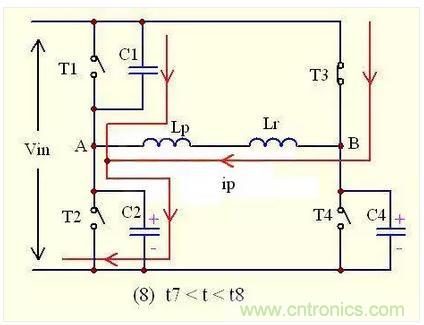
開關(guān)模態(tài)八:負(fù)半周期超前臂諧振過程
如上圖,此時(shí)超前橋臂下管T2在t7時(shí)刻關(guān)斷,但由于電感兩端電流不能突變的特性,變壓器原邊的電流仍然需要維持原來的方向,故電流被轉(zhuǎn)移到C1與C2中,C2被充電,電壓很快會(huì)上升到輸入電壓Vin,而C1的電荷很快就被抽走,C1兩端電壓很快就下降到0V,即將A點(diǎn)的電位鉗位到Vin。
由于次級(jí)折算過來的感量LS`遠(yuǎn)遠(yuǎn)大于諧振電感的感量Lk,故基本可以認(rèn)為此是的原邊類似一個(gè)恒流源,此時(shí)的ip基本不變,或下降很小。
C2兩端的電壓由下式給出
Vc2=︱-Ip︱*(t8-t7)/(C1+C2)= Ip*(t8-t7)/2 Clead
C1兩端的電壓由下式給出
Vc1= Vin- 【︱-Ip︱*(t8-t7)/2 Clead】
其中Ip是在模態(tài)8流過原邊電感的電流,在t8時(shí)刻之前,C2上的電壓很快上升到Vin,C1上的電壓很快變成0V,D1開始導(dǎo)通。
在t8時(shí)刻之前,C2充滿電,C1放完電,即 VC2= VC4=VA=VB = Vin VC1=VAB= 0V
模態(tài)8的時(shí)間為
△t= t8-t7=2 Clead * Vin/ Ip
注意:此△t時(shí)間要小于死區(qū)時(shí)間,否則將影響ZVS效果。
第4、8種工作模式分別是滯后臂與超前臂的諧振模式,稍后上詳細(xì)的分析過程
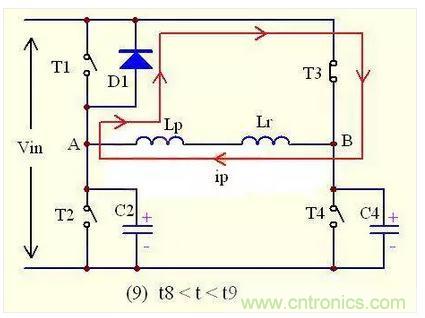
開關(guān)模態(tài)九:原邊電流負(fù)半周期鉗位續(xù)流過程
如上圖,在t8時(shí)刻二極管D1已經(jīng)完全導(dǎo)通續(xù)流,將超前臂上管T1兩端的電壓鉗位到0V,此時(shí)將T1打開,就實(shí)現(xiàn)了超前臂上管T1的ZVS開通;但此時(shí)的原邊電流仍然是從D1走,而不是T1。
此時(shí)流過原邊的電流仍然較大,等與副邊電感Lf的電流折算到原邊的電流即 ip(t)= iLf(t)/n
此時(shí)電流的下降速度跟副邊電感的電感量有關(guān)。
從超前臂T2關(guān)斷到T1打開這段時(shí)間td,稱為超前臂死區(qū)時(shí)間,為保證滿足T1的ZVS開通條件,就必須讓C1放電到0V,即
td ≥△t= t9-t8=2 Clead * Vin/ Ip
此時(shí), UC2=UC4=UA=UB =Vin , UAB=0V
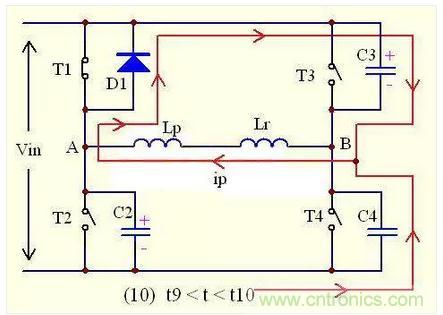
開關(guān)模態(tài)十:負(fù)半周期滯后臂諧振過程
如圖所示:在T9時(shí)刻將滯后臂上管T3關(guān)斷,在T3關(guān)斷前,C3兩端的電壓為0,所以T3屬于零電壓關(guān)斷。
由于T3的關(guān)斷,原邊電流ip突然失去通路,但由電感的原理我們知道,原邊電流不允許突變,需要維持原來的方向,以一定的速率減少。所以,原邊電流ip會(huì)對(duì)C3充電,使C3兩端的電壓慢慢往上升,同時(shí)C4開始放電。即 ip(t)=-I2sinω(t-t9)
vc3(t)=Zp*︱-I2︱sinω(t-t9)
vc4(t)=Vin-Zp*︱-I2︱sinω(t-t9)
其中,-I2:t9時(shí)刻,原邊電流下降之后的電流值
Zp:滯后臂的諧振阻抗,Zp= )0.5
ω:滯后臂的諧振角頻率,ω=1/(2Lr*Clag)0.5
同理,原邊的諧振電感Lr與滯后臂的兩個(gè)電容C3,C4諧振,其電壓與電流的關(guān)系就是正弦關(guān)系。
同開關(guān)模態(tài)四分析一樣的道理,由于原邊電壓的反向,根據(jù)同名端的關(guān)系,LS1,LS2同時(shí)出現(xiàn)上正下負(fù)的關(guān)系,此時(shí)VD1開始導(dǎo)通并流過電流;而由于LS2與Lf的關(guān)系,流過LS2與VD2的電流不能馬上減少到0,只能慢慢的減少;而且通過VD1的電流也只能慢慢的增加,所以出現(xiàn)了VD1與VD2同時(shí)導(dǎo)通的情況,即副邊繞組LS1,LS2同時(shí)出現(xiàn)了短路。
而副邊繞組的短路,導(dǎo)致Lf反射到原邊去的通路被切斷,也就是說會(huì)導(dǎo)致原邊參加諧振的電感量由原來的(Lf*n2+ Lr)迅速減少到只剩Lr,由于Lr比(Lf*n2+ Lr)小很多,所以原邊電流會(huì)迅速減少。
在t10時(shí)刻,原邊的UAB=ULr=Vin,UB=UC4=0V, UA=UC2=UC3=Vin
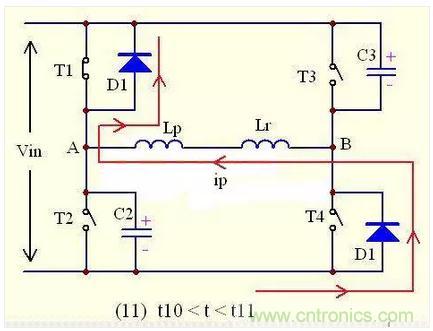
開關(guān)模態(tài)十一:諧振結(jié)束,原邊電感向電網(wǎng)饋能
如圖所示,當(dāng)C3充電到Vin之后,諧振結(jié)束,就不再有電流流過C3,C4,轉(zhuǎn)而D4自然導(dǎo)通,原邊電流通過D4—Lr—D1向電網(wǎng)饋能,其能量來源于儲(chǔ)存在Lr中的能量,此時(shí)原邊電流迅速減少,
ip(t)= -【Ip10- (t-t10)】
其中 Ip10是t10時(shí)刻的原邊電流值
在t11時(shí)刻減少到0。
此時(shí)T4兩端的電壓降為0V,只要在這個(gè)時(shí)間將T4開啟,那么T4就達(dá)到了零電壓開啟的效果。
對(duì)于開關(guān)模態(tài)11來說,諧振周期一定要小于死區(qū)時(shí)間,否則就不能達(dá)到滯后臂的ZVS效果了。但此時(shí)的諧振電感是沒有次級(jí)電感通過匝比反射回來的,所以只有諧振電感參與了諧振,在設(shè)計(jì)的時(shí)候小心了,諧振電感一定要足夠大,否則諧振能量不夠的話,原邊電流就會(huì)畸變。
在t11時(shí)刻,UAB=ULr= UC3=UA=Vin,UB=0V
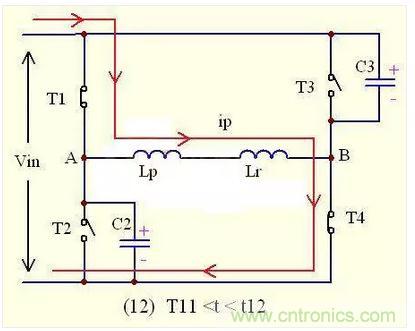
開關(guān)模態(tài)十二:原邊電流從0正向增大
如圖所示,在t11時(shí)刻之前,T4已經(jīng)導(dǎo)通,在t11時(shí)刻原邊電流ip已經(jīng)上升到0,由于沒有了電流,所以D1,D4自然關(guān)斷。
在t11-t12的時(shí)間內(nèi),副邊的二極管D1,D2還是同時(shí)導(dǎo)通流過電流,將副邊繞組短路,阻斷輸出電感反射到初級(jí)的途徑,此時(shí)的負(fù)載電流還是由次級(jí)電感與輸出電容提供;同時(shí),由于原邊的T1,T4已經(jīng)導(dǎo)通,原邊電流ip流過T1--Lr—T4,又因?yàn)長r很小,所以原邊電流ip就會(huì)正向急劇增大。
即 ip(t)= - (t-t11)
在t12時(shí)刻,ip達(dá)到最大,等于副邊的電感電流折算到初級(jí)的電流
即 ip(t12)= - ILf(t12)/n
在這個(gè)開關(guān)模態(tài),原邊電流是不傳遞能量的,但副邊卻存在著一個(gè)劇烈的換流過程,通過副邊二極管VD2的電流迅速減少,VD1的電流迅速增大,在t12時(shí)刻,通過VD2的電流減少到0,通過VD1的電流等于電感電流ILf。
在t12時(shí)刻,原邊的UAB= ULr=UA=UC3=Vin, UB= 0V
至此,一個(gè)完整的移相全橋工作周期分析已經(jīng)完成。
其中有一些地方可能有點(diǎn)小小錯(cuò)誤(歡迎指正),但不影響總體的工作原理分析12個(gè)工作模態(tài)我先用用圖紙的方式呈現(xiàn)出來了,為了便于分析,我省略了次級(jí)繞組的回路分析 。
12個(gè)工作過程包括:2個(gè)正負(fù)半周期的功率輸出過程,2個(gè)正負(fù)半周期的鉗位續(xù)流過程,4個(gè)諧振過程(包括2個(gè)橋臂的諧振過程與2個(gè)換流過程),2個(gè)原邊電感儲(chǔ)能返回電網(wǎng)過程,最后還有2個(gè)變壓器原邊電流上沖或下沖過零結(jié)束急變過程。這12個(gè)過程就構(gòu)成了移相全橋的一個(gè)完整的工作周期,只要有任何一個(gè)過程發(fā)生偏離或異常,將會(huì)影響到移相全橋的ZVS效果,甚至?xí)?dǎo)致整個(gè)電源不能正常工作。
接下來說說移相全橋存在的問題
問題一:滯后臂較難實(shí)現(xiàn)ZVS
n 原因:
滯后臂諧振的時(shí)候,次級(jí)繞組短路被鉗位,所以副邊電感無法反射到原邊參加諧振,導(dǎo)致諧振的能量只能由諧振電感提供,如果能量不夠,就會(huì)出現(xiàn)無法將滯后臂管子并聯(lián)的諧振電容電壓諧振到0V.
n 解決方法:
①、增大勵(lì)磁電流。但會(huì)增大器件與變壓器損耗。
②、增大諧振電感。但會(huì)造成副邊占空比丟失更嚴(yán)重。
③、增加輔助諧振網(wǎng)絡(luò)。但會(huì)增加成本與體積。
n 問題二:
副邊占空比的丟失
n 原因:
移相全橋的原邊電流存在著一個(gè)劇烈的換流過程,此時(shí)原邊電流不足以提供副邊的負(fù)載電流,因此副邊電感就會(huì)導(dǎo)通另一個(gè)二極管續(xù)流,即副邊處于近似短路狀態(tài);
Dloss與諧振電感量大小以及負(fù)載RL大小成正比,與輸入電壓大小成反比。
n 解決方法:
①、減少原副邊的匝比。但會(huì)造成次級(jí)整流管的耐壓增大的后果。
②、將諧振電感改為可飽和電感。因?yàn)樵诔跫?jí)換流的過程中,一旦進(jìn)入電感的飽和狀態(tài),那么流過電感的電流馬上就會(huì)變?yōu)轱柡碗娏?,而不是線性的減少,這就意味著減少了換流時(shí)間,等效于減少了占空比丟失時(shí)間。當(dāng)然我這么解釋看起來有點(diǎn)不好理解,要結(jié)合移相全橋的工作過程來理解,還是可以慢慢去體會(huì)的
將PSFB的磁性器件計(jì)算方法貼出來。
n 輸出儲(chǔ)能電感設(shè)計(jì):
移相全橋的輸出儲(chǔ)能電感其實(shí)可以看做一個(gè)單純的BUCK電感,由于其正負(fù)半周期各工作一次,所以其工作頻率等于2倍開關(guān)頻率,其計(jì)算公式為:
Lf = Vo *(1-Dmin)/(4*fs* △I)
上式中的Lf是最小電感,實(shí)際取值要大于此值,以保證電流的連續(xù)性,如果需要輸出電壓在一定范圍內(nèi)連續(xù)可調(diào)的話,則Vo要取Vo(min),即
Lf = Vo(min) *(1-Dmin)/(4*fs* △I)
上式Dmin是為了便于理解,實(shí)際上移相全橋占空比是不變的,不存在最小占空比的說法:即
Dmin= Vo(min)/(Vin(max)/n-VLf-VD)
n 主變壓器設(shè)計(jì):
首先計(jì)算出移相全橋的次級(jí)輸出最低電壓:
Vsec(min)=( Vo(max)+VLf+VD)/ Dsec(max)
初次級(jí)的變壓器匝比為:
n=Vin(min) /Vsec(min)
選擇變壓器,使用Ap法:
Ap =Ae*Aw= Po*104 /(4*?*fs*△B*J*Ku*)
接下來計(jì)算變壓器原邊匝數(shù):
Np= Vin(min)*D(max)/(4*fs*Ae*Bmax)
那么次級(jí)繞組匝數(shù)為:
Ns= Np/n
n 諧振電感設(shè)計(jì):
附加諧振電感的目的就是為了實(shí)現(xiàn)滯后臂開關(guān)管的ZVS,如前面的分析,滯后臂諧振時(shí)次級(jí)電感不能通過變壓器反射到初級(jí),為了保證滯后臂的開關(guān)管ZVS,那么諧振電感的能量必須滿足下式:
LrIp2/2=( Vin2*C上管)/2+( Vin2*C下管)/2= Vin2*Clag
即 Lr= 2* Vin2*Clag /Ip2
其中 Lr:諧振電感值
Vin:輸入電壓
Clag:滯后橋臂電容(外加電容與MOSFET結(jié)電容)
Ip:滯后橋臂關(guān)斷時(shí)刻原邊電流大小
計(jì)算還要考慮以下幾點(diǎn)因素:
①、Vin應(yīng)取最高輸入電壓值,保證任意輸入電壓下,滯后橋臂均能實(shí)現(xiàn)ZVS。
②、考慮在輕載Ip1(10%-20%負(fù)載)時(shí)刻,需要滯后橋臂仍然需要工作在ZVS狀態(tài)。
③、輸出電流iLf在某個(gè)值(比如2A)時(shí)刻,輸出儲(chǔ)能電感電流任然連續(xù)或處在臨界點(diǎn)。
也就是說,輸出儲(chǔ)能電感的脈動(dòng)電流等于2倍此值
即 △ iLf = 2 *2A=4A
那么 Ip=(Ip1+ △iLf /2)/n




